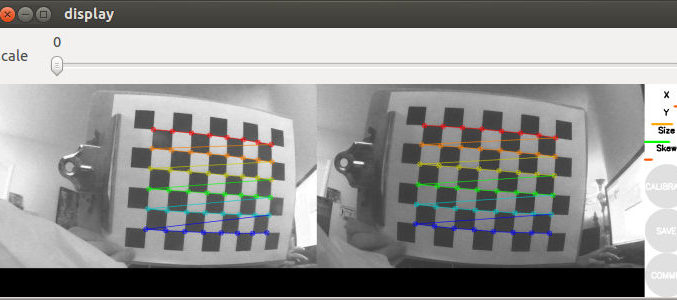
I created a ROS driver for the ELP-1MP2CAM001 Dual Lens stereo camera while working on some underwater point-cloud applications. Included in the package is: a URDF macro for the camera a usable calibration udev rules to reliably access the two cameras a launch file to start two usb_cam nodes and a stereo_image_proc node a launch file to start the calibration process Links Source: https://github.com/joshvillbrandt/elp-stereo-camera-ros-pkg Documentation: http://wiki.ros.org/elp_stereo_camera