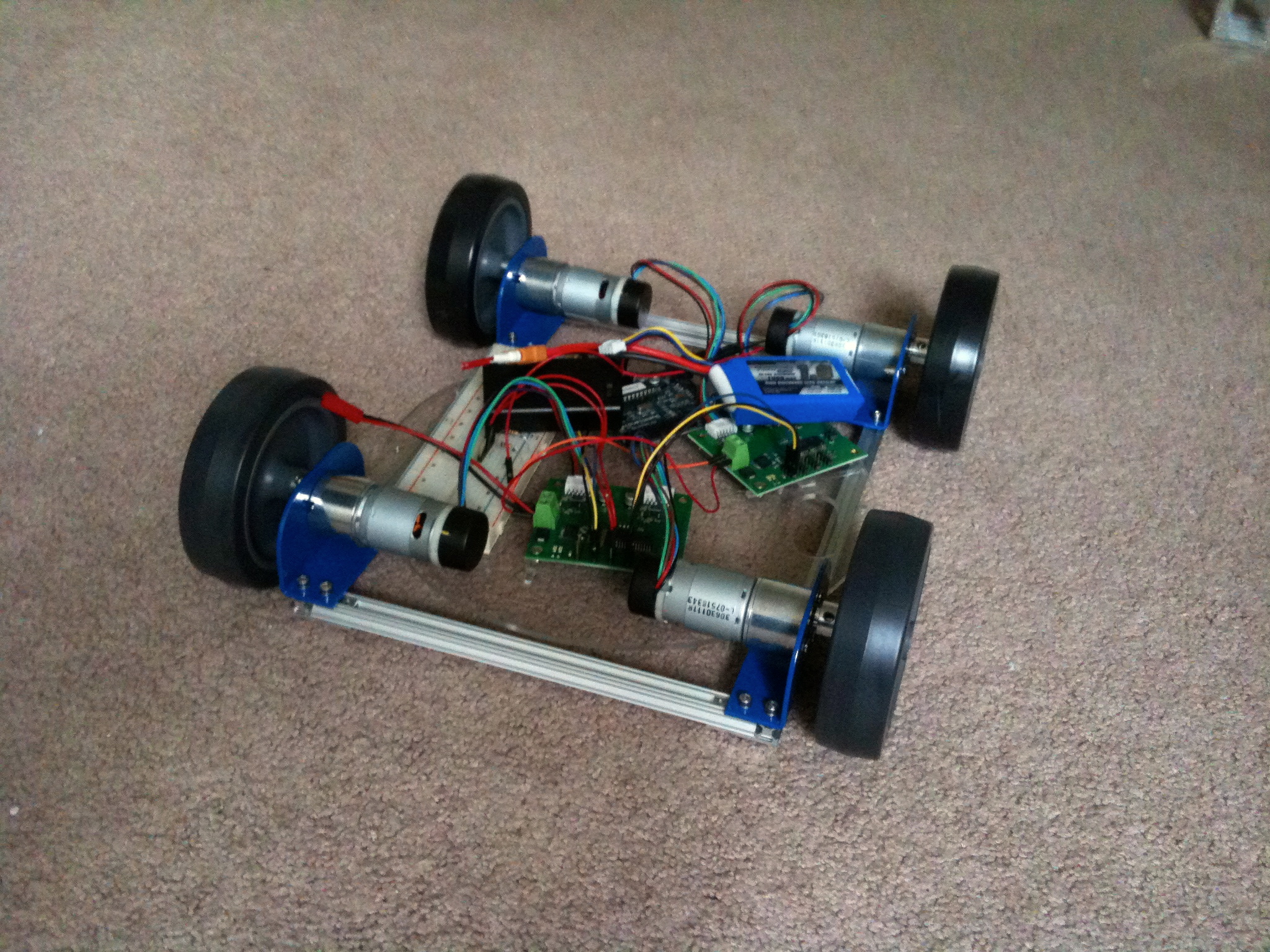
This passed week I have been playing with the new motors and motor drivers I got for the Mecanumbot. I used some MicroRAX pieces and the supplied motor brackets to piece everything today. I controlled the MD25 motor controllers over I2C using an Arduino which was getting commands from an RC transmitter. Unfortunately the naive method of reading in the RC receiver signals of only three channels takes up nearly…