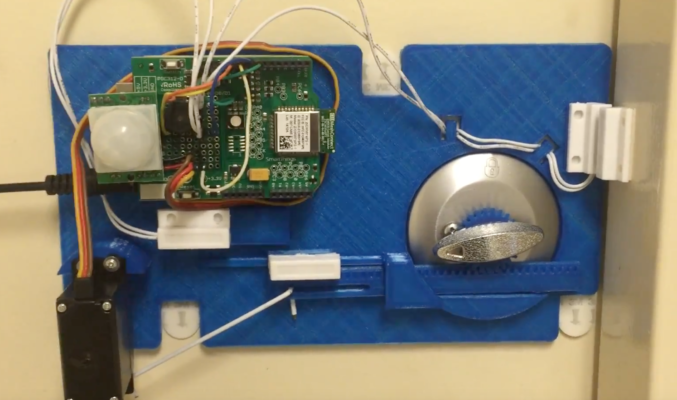
My latest creation is an internet-of-things door lock. The package actuators the deadbolt using a servo and determines if the door is shut or not using a reed switch. There is also a motion sensor that can determine if someone is approaching the door. The lock builds on the SmartThings platform using their Arduino Shield. With it I can control the lock over the Internet using the SmartThings app. What…