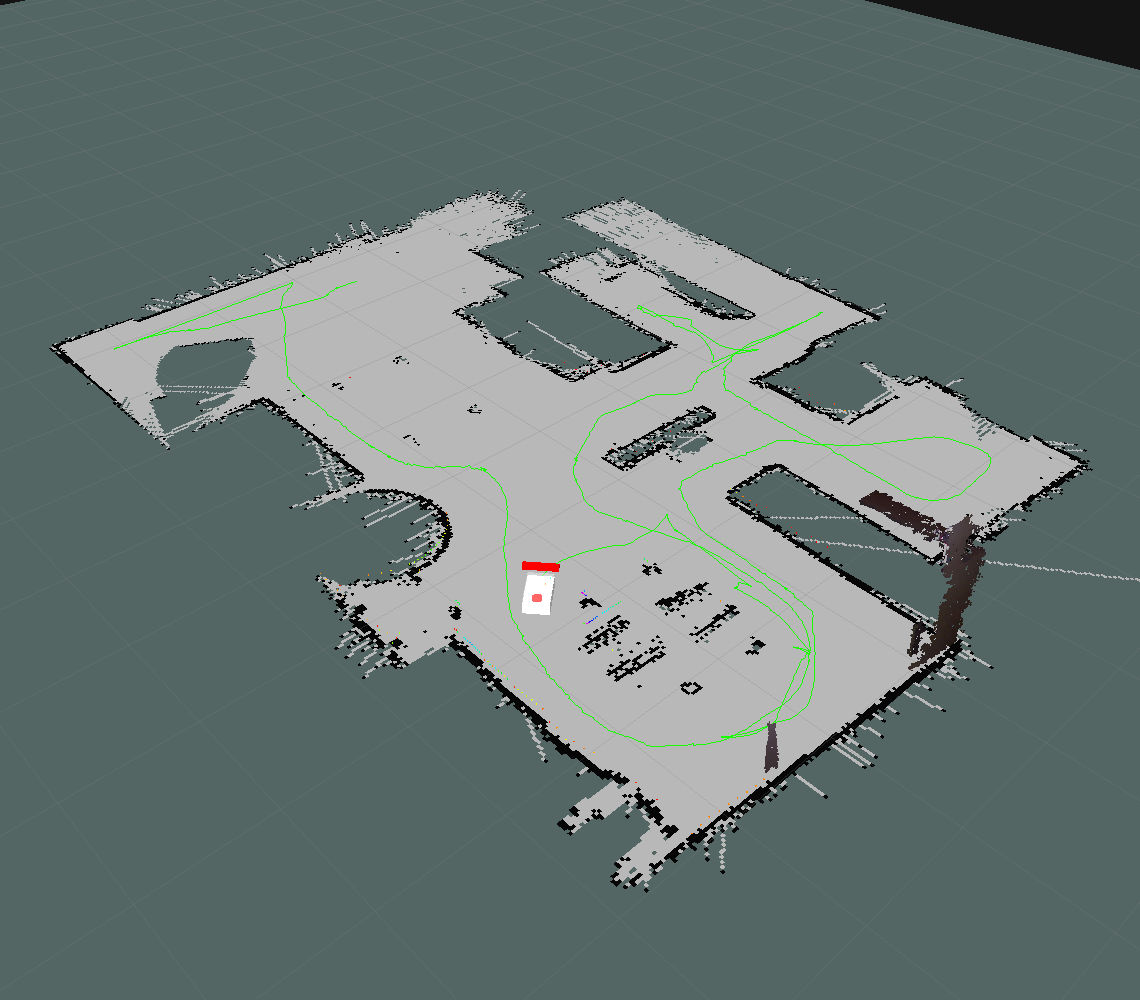
I finally set some time aside to build some maps of my apartment using a SLAM algorithm! I ended up using the hector_slam package in ROS to do the job. There was a lot of trial and error involved in tuning my odometry and the hector_slam algorithm, but it eventually worked just fine. Check out the screenshots below!